
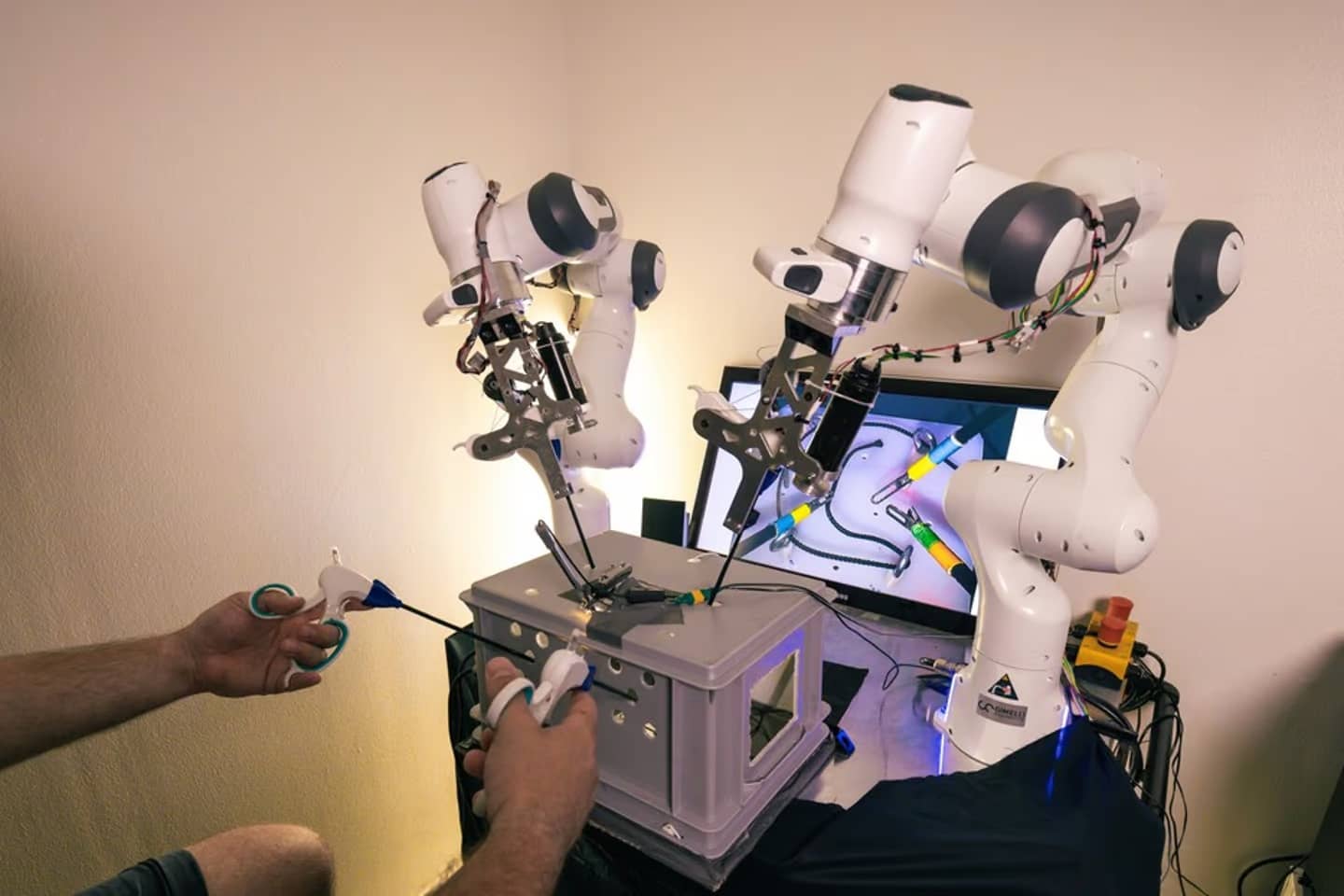
たとえば、ロボット手術のシステムを考えてみましょう。 ダヴィンチX しばらく前にお話ししたこと。すごいですね。外科医の手の動きに忠実に動く2本のアーム。それでも、一歩、いや 2 歩前進することを決意した人たちがいます。新しい実験システムではさらに 2 本の腕が追加され、今度はユーザーの足で制御されます。手術室での本格的なダンス。
この革新的な XNUMX アーム腹腔鏡システムは、優秀な科学者の成果です。 EPFLの、スイス研究所。
プレシジョンダンス: どのように機能するのでしょうか?
各ユーザーの手には、ハサミのハンドルに似たコントローラーが握られています。これらのツールのおかげで、両方のメイン ロボット アームを同時に操作することができ、それぞれのロボット アームはメスやレトラクターなどの異なる主要な手術器具を保持できます。
しかしそれだけではありません。医師の足も 2 つのペダルの上に置かれています。 1 つは内視鏡カメラを保持する小さな二次アームを制御し、もう 1 つはクランプを備えた最終アームを制御します。どちらのペダルでも、アクチュエーターは触覚フィードバックを提供し、患者の体のデリケートな部分に過度な力がかからないよう、手術室での外科医の行動をガイドします。
混乱する危険はありませんか?
XNUMX つのツールを同時に操作するのは疲れるし、混乱する可能性があります。 このため、システムは外科医の基本的な動作の一部を予測し、それに応じて外科医の動きをガイドすることができます。
たとえば、縫合糸に結び目がある場合、内視鏡は最適な視界を提供する位置に自動的に移動し、クランプは介入領域の外に移動されます。
一言で言えば、本物の食堂のアシスタントです。 確かに、XNUMXつです。 モハメド・ブーリEPFL の REHAssist グループの責任者である彼は、それについて次のようにうまく説明しています。「私たちのシステムは、4 人の手による腹腔鏡手術を実行する新たな可能性をもたらし、通常は 2 人、場合によっては 3 人で行われる作業を外科医が実行できるようになります。」
未来は手術室…ダンス
このシステムの臨床試験は現在ジュネーブで進行中であり、その結果は素晴らしいものになることが期待されています。精度、テクノロジー、そして人間の創意工夫の真のコンサートであるシステムの詳細な説明が、International Journal of Robotics Research () に掲載されました。ここにリンクします).
あなたが医師、エンジニア、あるいは単に進歩に情熱を持っている人であろうと、皆さんはこの魅力的な医学の交響曲を目撃するよう招待されています。最後の拍手を送る準備はできていますか?

