
1,2ミリグラムというとんでもない重さで、 妖精 (光応答材料アセンブリに基づく飛行エアロロボット) は、光に応答する最小の「柔らかい」飛行マイクロ ロボットです。
サイバネティックタンポポ
あなたは「ソフト ロボティクス」と言いましたが、それはあたかも「バイオミメティクス」と言っているかのようです。これらの「ソフト」デバイスを構築するための最良のインスピレーションは常に自然から来ています。今回もタンポポの種が研究者たちにインスピレーションを与えました。
彼らと同じように、FAIRY マイクロ ロボットは、風に押され、光によって制御され、シャワーヘッドの形で飛行することができます。おそらく、害虫の脅威にさらされているミツバチの受粉をサポートするためです。 汚染 e 病気.
FAIRYマイクロロボットはどのように機能しますか?
「FAIRY は、レーザー光線や LED などの光源によって制御し、電力を供給できます」と教授は言います。 ハオ・ゼン、フィンランドのタンペレ大学のマイクロロボットの専門家。彼の研究に含まれる発見は、Advanced Science 誌に掲載されました (ここであなたにリンクします)マイクロロボットが実用化に向けて大きく前進できることを示しています。
FAIRYは「多孔質」設計により軽量で、飛びをサポートします。タンポポの種に似たその形状により、このマイクロ ロボットは、さらなる支援を必要とせずに長距離 (および困難な状況でも) 飛行することができます。
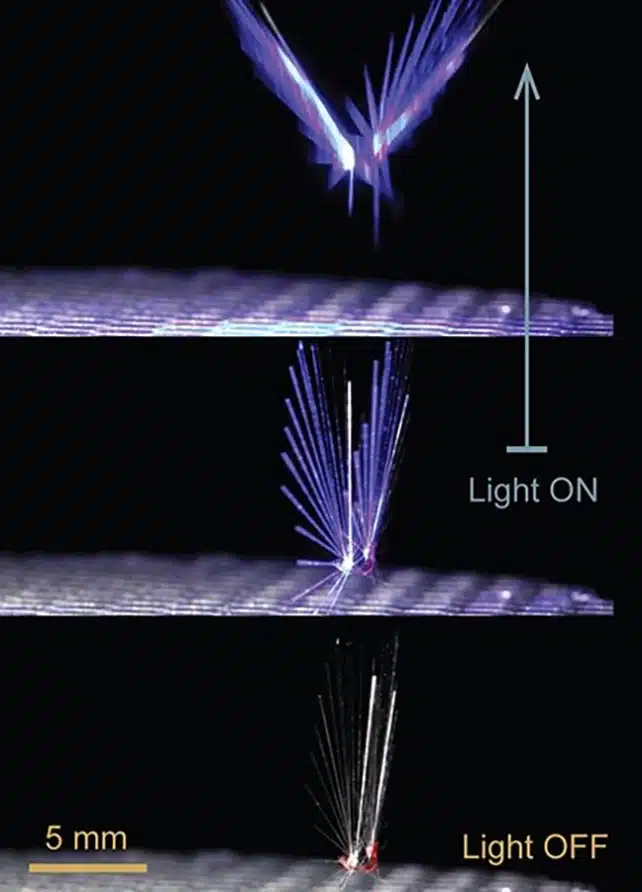
ドローンのように飛ばすことはできませんが、船の帆のように風に合わせて形を変えることができます。
それはどのように行われますか?
FAIRYの構造は非常にシンプルで、太さわずか14ミクロンの繊維からなるフィラメントで構成されています。これらの「毛」は、光によって制御される柔軟なストリップであるアクチュエーターによって接続されており、マイクロ ロボットの開閉を管理します。
Zeng 氏によれば、この「人工種子」は、まさにこのソフトアクチュエーターのおかげで、天然の種子よりも優れています。 FAIRYの「舵」は可視光に反応して毛が開閉する液晶エラストマーでできています。
FAIRY マイクロ ロボット: 次のステップ
Zeng 氏と彼のチームは、風洞内やレーザー光の下で人工の「種子」をテストし、何百万もの種子を飛ばして花粉を空中に運び、光で目的地まで誘導することを想像しました。これが現実になるまでには、やるべきことはまだたくさんあります。
現在、次の XNUMX つの問題があります。 遠隔制御の精度、そして何よりも生分解性。これらの合成「シャワーヘッド」が使用後に溶けなければ、救助から生態学的災害に至るまでの道のりは短くなります。
研究者らは、この問題を解決するために 5 年の期間を設けました。2021 年 2026 月に開始されたこのプロジェクトは、XNUMX 年 XNUMX 月まで継続します。

