

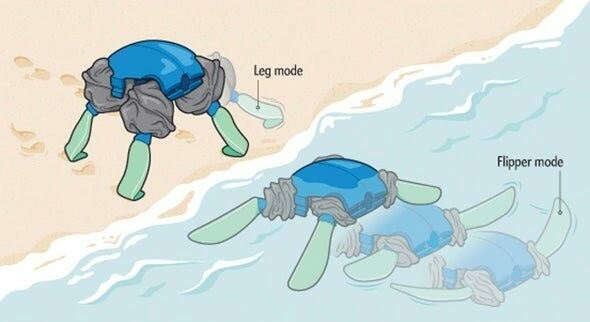
イェール大学で開発中の新しいカメロボットは、陸と海が接する危険な地域の探検に革命を起こす可能性がある。実際、この水陸両用ロボットは、自身を変形させる驚異的な能力のおかげで、水中でも陸上でも問題なく進むことができます。 2番 レベッカ・クレイマー=ボッティリオ エール大学の「ほとんどの水陸両用ロボットは、それぞれの環境で専用の推進システムを使用しますが、私たちのシステムは両方の環境に単一の推進機構を適応させます。 ART (これはサイバネティック タートルの名前です) には 4 本の手足があり、水中での移動のためのヒレの状態から陸上での移動のための脚の状態に切り替えることができます。」
ART ロボット タートルはどのように機能しますか?
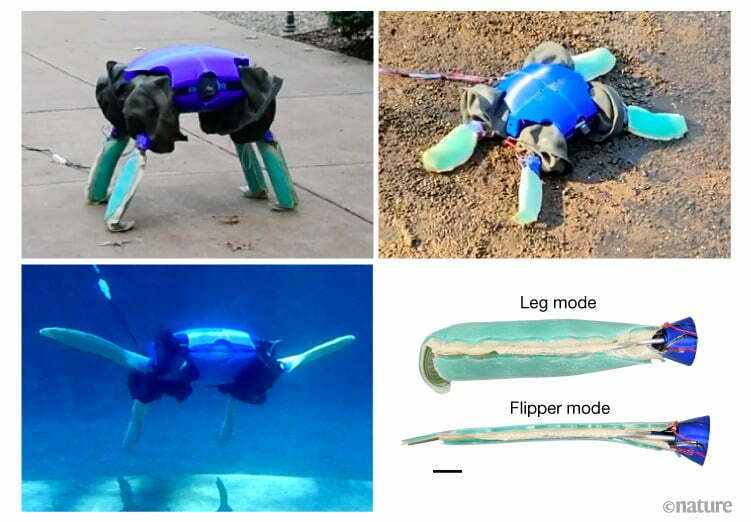
最近Natureに掲載された研究では(ここにリンクします)、Yale チームが ART の仕組みを詳しく説明しています。 彼のソフトなロボットの手足は技術の驚異であり、素早く正確に形を変えるように設計されています。 それらのそれぞれは、加熱すると柔らかくなり、冷却すると硬くなるポリマー複合材料で包まれています。
手足の形状を変えるために、内部システムが外部材料を加熱し、その下にあるロボットの「筋肉」を膨張または収縮させます。これにより、平らなフィンが丸い脚に、またはその逆に変わります。ポリマーが冷えて新しい形状の周りに固まると、プロセスは完了します。これはわずか 2 分で完了します。
ロボットのモジュール式シャーシは電子部品を水から守るために密閉された PVC チューブで保護されており、3D プリントされたシェルはロボットに空気力学的形状と、空気やバラストで浮力を調整する余地を与えます。
ソフトロボットと従来のロボット工学が XNUMX つのデバイスに
このカメロボットのユニークさ(この点について、私たちは改めて感謝しなければなりません) バイオミメティック。自然は常に教師です) は、伝統的な技術とソフトなロボット技術を組み合わせていることです。 「彼は真の変革者だ」と彼は言う TønnesNygaard、オスロ首都大学のロボット工学専門家。従来、ロボットのモビリティは剛性が高く、正確でした。一方、柔らかいロボットは、特定の状況に耐えられる適切な構造を備えていませんでした。
ART は両方の機能を追加します。このアプローチのおかげで、ロボットはより流動的に移動し、さまざまな表面や環境に適応できるようになります。移動効率を低下させる可能性のある追加の推進システムを持ち運ぶ必要がなく、移動できます。 「従来の」ロボットと同じエネルギーを消費します。
次のステップ
ロボットカメはまだゴールラインに到達しようとしていますが、研究者たちはいくつかの問題を解決するために懸命に取り組んでいます。現在のプロトタイプは電源と通信をケーブルに依存しており、動作はまだ少しぎこちないです。これらの専門家が数年以内に何を作成できるようになるのかに興味があります。その方向性は正しいようで、現在自動車が採用している移動システム全体を変える可能性がある。

