
細長い形のこのロボットアームは、XNUMXのアプリケーションで効果的に拡張したり、折りたたんだりできる一種のアコーディオンのように見えます。
このデザインは、新しい研究で詳しく説明されています ジャーナルPNASに掲載は、タコの触手に触発され、オブジェクトを伸ばしたり、ねじったり、操作したりする方法を模倣しています。 その作成者は、呼吸管を口から挿入したり、カテーテルを挿入したりするなど、侵襲的な手順や操作を支援するために、生物医学アプリケーションに統合できることを望んでいます。
「タコの神経系は触手にあります」と彼は言います ルイケ・レニー・ジャオ、スタンフォード大学の機械工学の助教授であり、新しい論文の著者。
ここで行っているのは、彼の非常にインテリジェントなアームシステムを模倣することです。 タコの触手は非常に用途が広いので、オブジェクトと相互作用するために何百、何千もの異なる動きをすることができます。
ルイケ・レニー・ジャオスタンフォード大学
タコに着想を得た新しいロボットアームの作り方
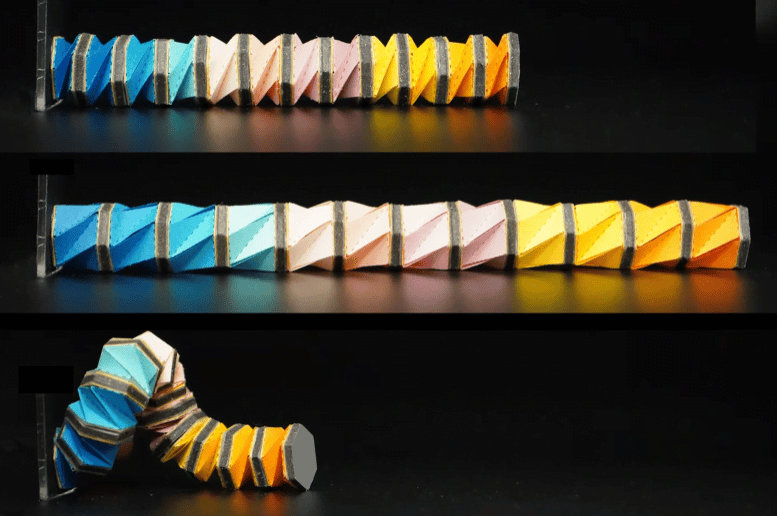
新しいロボットアームは、モーターではなく磁場を動力源とする動き、折り紙に着想を得たパネル、柔らかい外骨格など、いくつかの重要な機能に柔軟性を備えています。
「折り紙」タコ
一連の小さなセグメントがこれの単一のアームを構成します ソフトロボット。 各セグメント内に、折り紙のパターンで設計された傾斜したプラスチックパネルに磁性粒子がセットされたXNUMXつの柔らかいシリコン六角形プレート レスリング、ひねって伸縮する折り紙風。 パネルの形状により、タコの触手のように、腕をチューブに伸ばしたり、圧縮した構成に縮めたりすることができます。
腕全体に磁化されたプレートがあるため、ロボットのタコは、MRIスキャナー内で作成されたもののように、強力な磁場を使用してリモートで操作できます。 テスト段階では、研究者は電磁コイルを使用して腕の周りにXNUMX次元の磁場を作成しました。 腕の周りの磁場の方向を調整することで、個々の折り紙ユニットの動きと変形をガイドすることができます。 この設計により、研究者は各腕のセグメントを個別に制御して、動きを微調整することもできました。
外部磁場を制御することで、伸びや曲がりなどの組み合わせを制御できます。 タコロボットが曲がり始める正確なポイントを確認できました。
ルイケ・レニー・ジャオスタンフォード大学
並外れた多様性
磁化力から寸法、素材、ユニット数まで、アーム内のすべてをカスタマイズすることができます。
モーターを組み込むことなく動くことができるロボットを手に入れる能力は、絶対に信じられないほどの要因です。 これにより、「タコ」ロボットシステム全体のサイズを実際に最小化し、可能なアプリケーションを劇的に増やすことができます。

