
ロボット工学の世界では、物体を持ち上げる従来のアプローチは主に手を使うことに重点が置かれています。トヨタは、このパラダイムを再定義したいと考えています。 プニョ。上半身が柔らかく、全身を使って物を抱きしめて運ぶロボットです。言い換えれば、かさばる荷物を扱うために手だけでなく胸や腕も使うという人間の自然な傾向を模倣しているのです。
物を持ち上げる革新的なアプローチ: 物体を抱きしめる
ロボット工学の分野でトヨタがもたらしたイノベーションは、前述したように、物体の持ち上げと輸送に対する独自のアプローチで際立っています。問題のロボット、プニョは従来のロボットと比較して大きな変化を示しています 人型ロボット。体全体を使って物を抱き上げることができるため、使用の可能性が広がります。
この装置は、さまざまなシナリオ、特に物体を扱う際の繊細さと順応性が重要となる家庭や介護の環境で非常に効果的です。

デザインと機能性
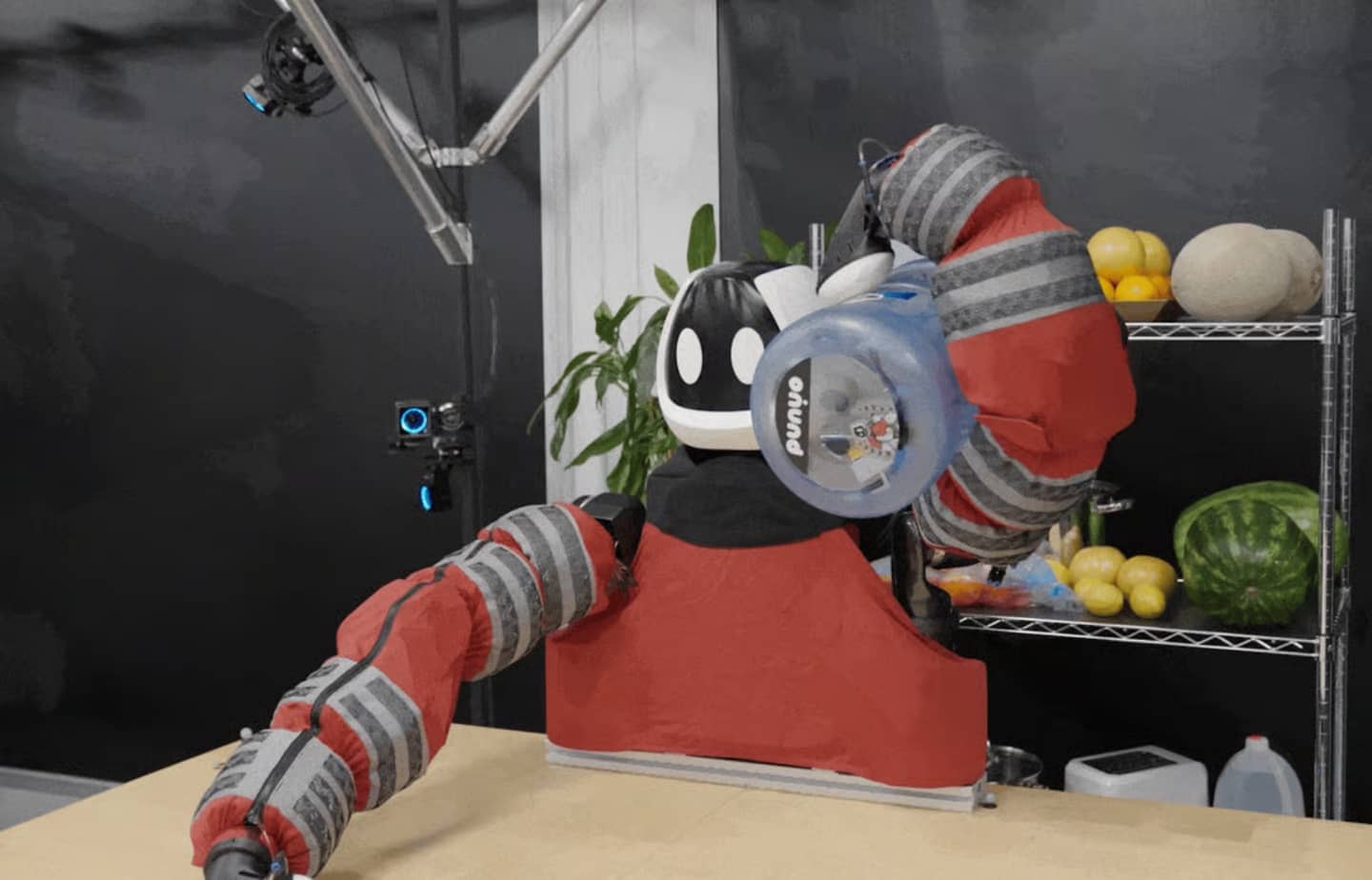
プニョは間違いなくそのデザインでも際立っています。彼の外見は、ディズニーのアニメ『ベイマックス』に登場するロボット、ベイマックスを彷彿とさせます (彼を見たことがありますか?)。そして、正直に言ってみましょう。「セーター」を着たロボットはどこで見つかりますか?この場合、それは単なる美的要素ではありません。この「ドレス」の体にフィットする素材には、高度な感覚システムが隠されています。
プニョがハグして、ハグしているものを「感じる」ことができるセンサーにより、(物でも人でも) 安全かつ繊細な操作が保証されます。
ハグは最先端のテクノロジー
このロボットは、「足」と呼ばれる特殊な手を使用し、その先端は変形可能で膨張可能なパッドになっています。これらのパッドには内部カメラで監視されるドットパターンが装備されており、プニョが物体との接触を認識できるようになり、さらなるレベルのインタラクションと周囲環境の理解を追加します。
繰り返しますが、ロボットのアームには、必要に応じてアームの硬さを変更するために調整できる膨張可能な要素が装備されており、プニョの多用途性をさらに拡張する機能です。
学習と適応力
トヨタは、高度な AI 学習プロセスを使用して、プニョにさまざまな物体を扱う方法を教えています。遠隔操作と例に基づいた学習システムを通じて、ロボットは持ち上げや運搬の技術を自律的に適応させる能力を獲得しています。
この学習プロセス (Android で最も一般的な、 どうやら)は、プニョが効率、速度、精度などの基準に基づいてアクションを最適化できるようにするプログラミング ロジックによってサポートされており、このカテゴリのパイオニアとなっています。
魅力的なデザイン、高度な感覚技術、柔軟な学習システムの組み合わせにより、Punyo はロボットがどのように未来を受け入れるかを示す優れた例となっています。これらのスキルを磨くことによって、それらは私たちの日常生活に不可欠な部分となり、私たちが想像していることをはるかに超えた仕事を支援してくれる可能性があります。
ソース: トヨタ研究所

