
スイスの有名な研究機関ETHチューリッヒでは、エンジニアのチームがロボット工学の新境地を開発しました。 マグネッコ。このロボットは、クモとヤモリの両方からインスピレーションを得たデザインの結果であり、ロボットモビリティの分野における重要な革新を表しています。
XNUMX つの足に永久電磁モジュールを装備した Magnecko は、重力の常識を無視して壁や天井を正確に移動する独自の能力を備えています。 そして、そのようなことに対する私の嫌悪感。

ロボットモビリティの進化
ロボット工学の世界は驚きが絶えません。 毎日、新しいフロンティアが探求され、新しいソリューションが考案されています。 マグネッコ しかし、それは特別な点で際立っています。の創造スイス連邦工科大学チューリッヒ校 それは単なる別のロボットではなく、テクノロジーがどのように自然の能力を模倣し、さらには強化できるのかを理解するための進化です。
クモとヤモリは、何十年にもわたって科学者を魅了してきた生き物です。垂直面や逆さまでも移動できるロボットの能力により、エンジニアは「この能力をロボットでどのように再現できるだろうか?」と疑問を抱きました。答えはマグネッコーです。その電磁足により、ヤモリが小さな毛を使ったり、クモが粘着性のある足を使ったりするのと同じように、表面に貼りつくことができます。 美しい、確かに怖い。
磁石の足の魔法
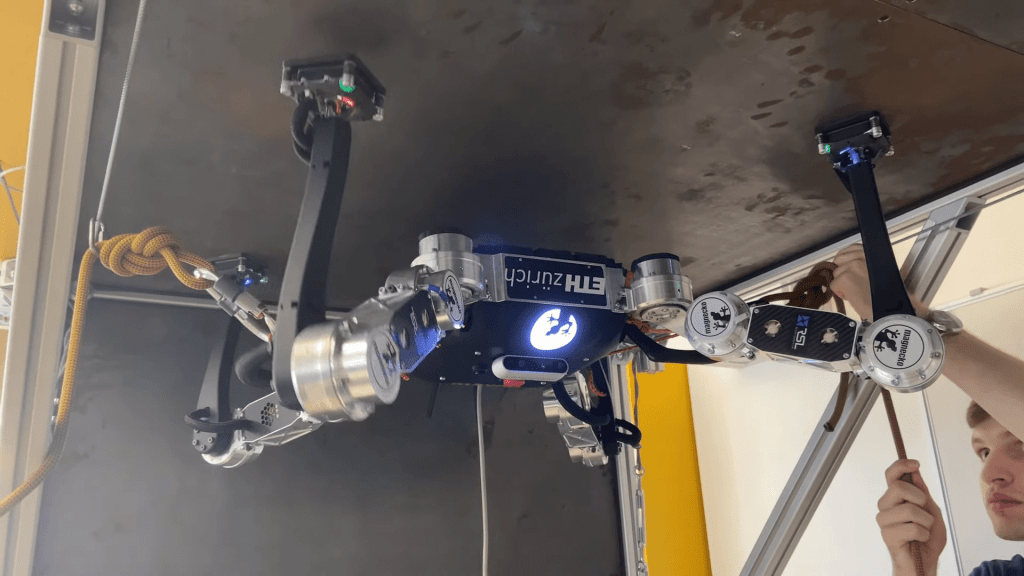
Magnecko の脚には永久電磁モジュールが装備されています。 これらのモジュールは小さな磁石で構成されており、ロボットが歩行するにつれて磁化と消磁を繰り返すことができます。 そして最も印象的な部分は何ですか? 機能するために一定の電気の流れは必要ありません。 これは、Robot Gecko Spider がエネルギーを消費せずに表面に貼り付くことができることを意味します。
現在、Magnecko にはワイヤレス コントローラーを持った人間のオペレーターが必要です。しかし、エンジニアたちは将来的にはロボットをより自律的にしたいと考えている。人間の介入を必要とせずに、建物や構造物を実際に検査することを想像してみてください。建設、橋やデリケートなインフラの安全性、さらには超高層ビルの清掃などの分野での飛躍的な進歩。

ロボットヤモリ: 自律メンテナンスの未来
エンジニアたちは、Magnecko が自律メンテナンスや遠隔操作による修理に使用できる未来を見据えています。 アクセスしにくい場所でも移動できるため、多くの業界で貴重なツールとなる可能性があります。
このようなソリューションは、以前は考えられなかった運用によるメンテナンスに革命をもたらす可能性があります。そして、かなり憂慮すべき側面があると言わざるを得ません。その効果を見てみましょう。

