

からの研究者 日本科学技術振興機構 e 東京大学 彼らは開発した XNUMX月四肢、さまざまなタスクで人間をサポートできるコンパクトなロボットの手足。 記事で紹介されたこの新しい手足 arXivで事前公開、最大250cmまで伸ばすことができ、ユーザーの近くにあるオブジェクトをつかむことができます。
「私たちは、コンピューターとロボットのアプローチで人間の能力を向上させることを目的とした人間拡張技術に興味を持っています」と彼は言います。 ハオラン・シエ、研究を行った研究者の一人。
私たちは特に人体の身体的改善に焦点を当てています。
ハオラン・シエ
手足を学び、脇に置きます
ほとんどの既存のウェアラブルロボットアームは、人間のユーザーの上半身(たとえば、上腕、腰、または肩)に取り付けるように設計されています。 これらのシステムのいくつかは有望ですが、面倒です。 「従来の」ロボットの手足を着用することは、ユーザーにとって不快な場合があります。
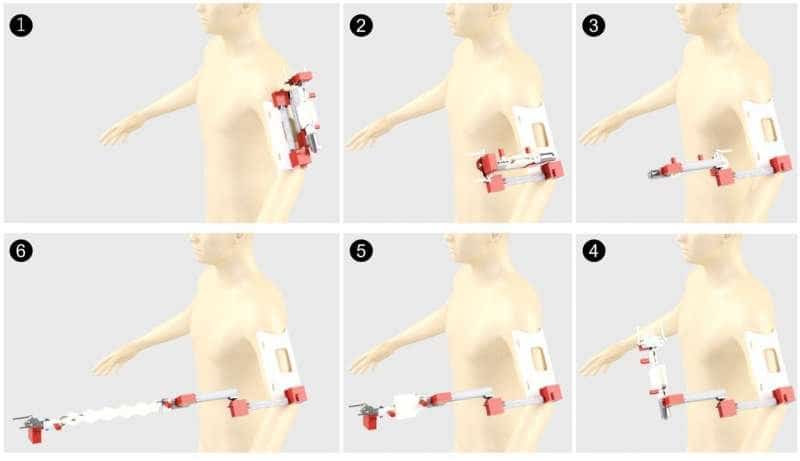
「私たちは、長時間使用する場合でも、着用者の日常の活動を中断することなく、小さなボリュームに折りたたむことができるコンパクトなロボットの手足を提案しました」とXie氏は言います。
他のロボットの手足とは異なり、AugLimbは大きく伸びることができ、人間の前腕の平均の長さの約2,5倍になります。 そして、それは保存するのは簡単です!
すべて余分な手足があります
AugLimbには7自由度があり、通常の3Dプリンターとエンジンを使用して簡単に製造できます。 軽量であるため、このロボットの手足は、子供や高齢者など、体格が壊れやすいユーザーに非常に適しています。 それは大量の「アクセサリー」になることができますか? それが開発者の考えです。
AugLimbは、シニアから幼児まで誰もがXNUMX日中快適に着用できるようになるため、近い将来、スマートウォッチと同じくらい人気があると信じています。
ハオラン・シエ
AugLimbは、基本的にXNUMX番目のアームとして機能するため、料理や掃除など、大量のオブジェクト操作を伴うタスクを人間が完了する状況で特に役立ちます。 これは、外科手術を行う医師、建設作業員、および日常的に手動タスクを実行するその他の専門家が使用できます。

今後の開発
Xieらによって開発されたロボットの手足はまだプロトタイプ段階にあります。 チームは、それをさらに効果的にするために、それをテストし、その機能を改善し続けることを計画しています(そして商業的に利益があると私は付け加えます)。
「今後の研究では、筋肉からの筋電図(EMG)信号や脳波を検出する脳波(EEG)技術など、生物学的情報を使用してAugLimbを制御する効果的な方法を模索したいと考えています」とXie氏は述べています。
ロボットの手足を制御するために、チームはディープラーニングを使用してこれらの信号の分析を改善することも計画しています。

