

盲導犬は視覚障害者のための移動補助具として重要な役割を果たしますが、すべての人にとって完璧な解決策ではありません。
償還を制限または防止できるいくつかの要因があります。 費用、小さなアパート、あるいはアレルギーでさえ、これらの美しい犬を多くの人に不向きにすることができます。 今日開発中のテクノロジー ラフバラ大学で 別の可能性を提供します。 これはTheiaと呼ばれ、片手で持てるデバイスに盲導犬の機能を組み込んでいます。
デバイスはTheiaと呼ばれ、工業デザインの学生によって考案されました アンソニー・カム、 バーチャルリアリティゲームコンソールや自動運転車からインスピレーションを得ました。
Theia、ポータブルロボット盲導犬
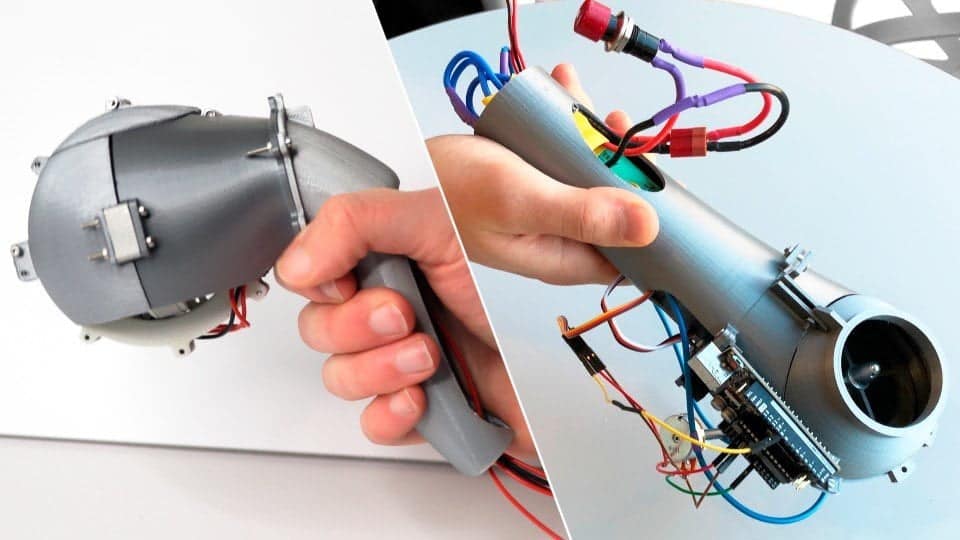
このテクノロジーは現在、いくつかのノードがスムージングされるプロトタイプの形をしていますが、基本的な前提は、Theiaが視覚障害者が目的地に到達するのを助けるロボットの盲導犬として機能することです。
このデバイスの鍵は特定のジャイロスコープです。これは、国際宇宙ステーションで使用されているものを含む、宇宙船の姿勢制御システムの一部としてよく使用されます。
ジャイロスコープを使用すると、Theiaが向いている方向に応じて強さのフィードバックを提供し、盲導犬の保護者のようにユーザーの手を動かして目的の方向に導くことができます。
自動運転車としての道を見つける
Theiaは、自動運転車のように、環境のXNUMX次元画像を構築できるカメラとライダーシステムによって方向付けられています。
ユーザーは音声コマンドで目的地を入力でき、オンボードプロセッサが最適なルートを決定します。
Theiaは、歩行者と自動車の交通量に関するリアルタイムのデータと時間を考慮します。

