
ユーザーは、トヨタのロボット執事を仮想現実で訓練し、彼が実行しなければならないタスク(複雑なタスクでも)を事前に示すことができます。
1年前、トヨタはXNUMX億ドルのコミットメントを発表しました 研究所 (TRI)は、数百人のエンジニアを雇用して、自動運転車などの人工知能に基づくロボットや製品に取り組んできました。
今週、TRIはジャーナリストに仮想オープンハウス(私が投稿したビデオの一部を見ることができます)に参加して、研究所によって行われた研究の最先端を知る機会を提供しました。
親愛なる、あなたは新しいシャンデリアを購入しましたか、それとも私に会えてうれしいですか?

イベントで展示されたプロトタイプのほとんどは、自宅の人々を助けることを目的としています。 アシスタントロボットのアイデアは何十年も前から存在していましたが、特に日本のように人口の高齢化によってサポートスタッフが不足する可能性がある国では、現実にもっともらしくなり始めていません。
トヨタのロボット執事
TRIのホームロボットの主なデザインは、家の天井に組み込まれた特別なレールのセットにぶら下がるように作られています。 限られた(したがって十分に制御された)範囲内で動作する実際の「関連性」。
Un po' diverso dal maggiordomo robot che immaginavamo scorazzare per casa con il suo bel vassoio in mano, ma evidentemente Toyota ha ravvisato una serie di vantaggi.素敵なトレイを手に家の中を歩き回っているロボット執事とは少し異なりますが、明らかにトヨタには多くの利点がありました。 Uno fra tutti proprio il ridotto ingombro nell'abitazione.そのうちの一つは家の小さいサイズです。
Con questa configurazione al robot maggiordomo serve molto meno tempo per apprendere la disposizione della casa.この設定により、ロボット執事は家のレイアウトを学ぶのにかかる時間が大幅に短縮されます。 Non ha bisogno di imparare percorsi complessi intorno agli ostacoli per spostarsi da un posto all'altro.場所から場所へ移動するために、障害物の周りの複雑な経路を学ぶ必要はありません。
TRIのロボットは、使用しないときは天井まで折りたたむことができるため、使用可能なスペースを実質的にゼロにします。
特権ビュー
ただし、このソリューションの最大の利点の 1 つは、特有のトップダウンの視点であると思われます。これにより、マシンは、その動作や操作する必要があるさまざまなオブジェクトの位置を観察するためのより良い視点を得ることができます。
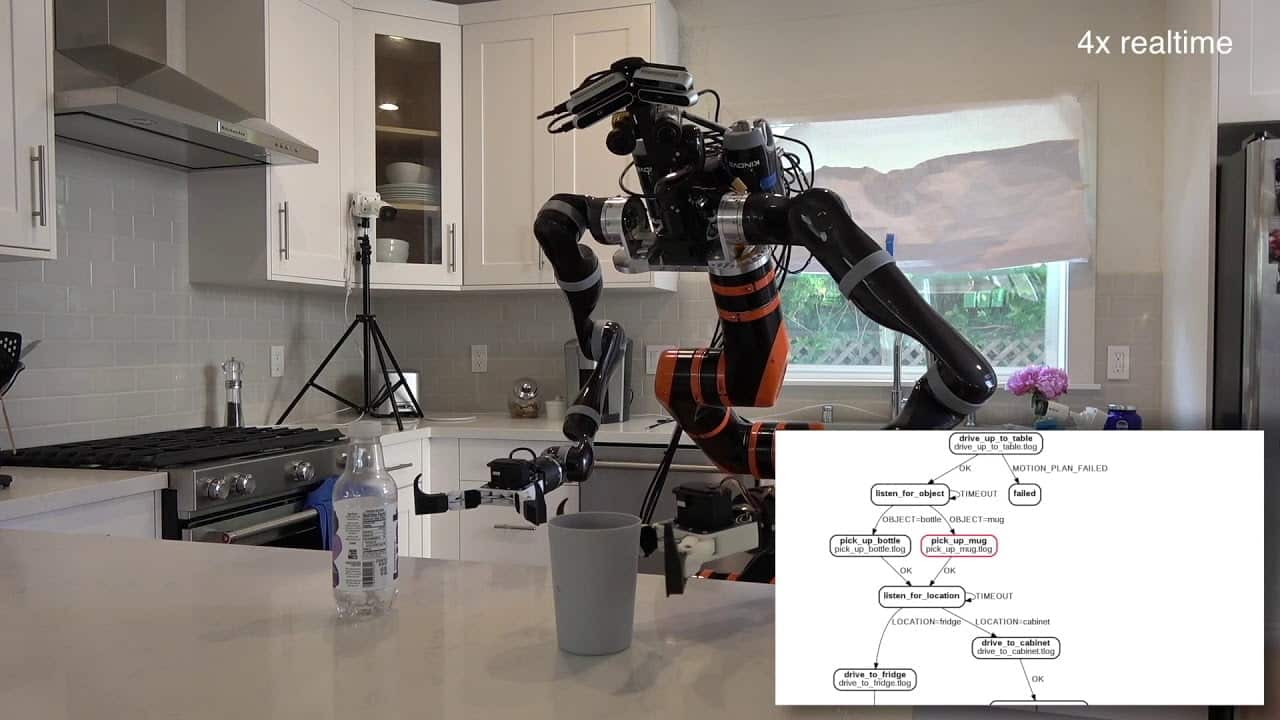
トヨタは、限られたパラメータセットから学習する執事ロボットのビジョンに大きく依存しています。 基本的に、カウンタートップを掃除する方法をロボットに学習させたい場合は、仮想現実環境でそのアクションを実行できます。 ロボット執事はあなたの行動を理解し、現実の世界でそれらを模倣し、自然に変数を監視します。
Può sembrare macchinoso, ma non è così.面倒に聞こえるかもしれませんが、そうではありません。 Considerate che dopo poco tempo ci sarebbero in giro molte azioni insegnate anche ad altri robot e condivise in rete, un po' come le ricette automatiche di certi robot da cucina.しばらくすると、特定の食品ロボットの自動レシピのように、他のロボットに教えられ、ネットワーク上で共有される多くのアクションがあることを考慮してください。
ロボット執事はどのように作られていますか?
ロボットアームの多数のジョイントにより、ロボットアームはすべての方向に移動できます。 一部のジョイントは冗長であるため、実質的に任意の位置で回転および方向付けできます。
現在、微調整する必要のある詳細はXNUMXつだけです。このようなロボット執事を設置するには、基本的に家全体を機械の周囲に設計する必要があります。
理想的には、ロボットは建設が始まる前の家の計画の中心的な部分になるでしょう。
ですから、この概念は、老人介護施設などの複数ユニットの建物でより理にかなっていると思います。 ビルダーがユニットを内部でほぼ同じに見せることができれば、エンジニアはXNUMXつのロボットだけをトレーニングし、その情報を他の部屋の残りのマシンと共有することができます。
その他の詳細
ホームボット全体に加えて、TRIはこのテクノロジーのいくつかのマイナーな側面も示しました。 最も重要なもののXNUMXつは、ロボット執事がアイテムを取るための爪です。 ライトのシステムは、ロボットの「手」とカメラの内側に一連のポイントを投影して、オブジェクトを拾ったときに手足のポイントがどのように変形するかを観察します。
その結果、システムは、相互作用しているオブジェクトのプロパティをリアルタイムで分析できます。 デモでは、彼が未知の表面にいくつかの繊細なワイングラスを積み重ねたことが示されました。
トヨタとTRIの進歩は目覚ましく、熱意を持って今後もこの種の技術に取り組んでいく予定です。 まだ一般公開する予定はありませんが、近い将来、これらのテクノロジーの少なくとも一部を展開する予定です。

