
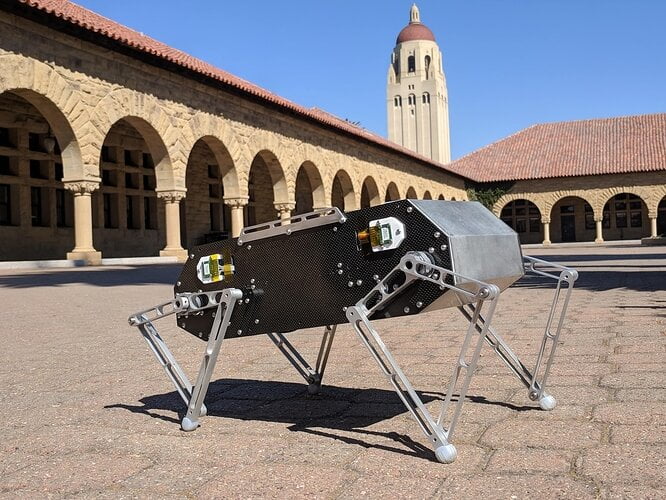
スタンフォード大学のロボット工学の学生は、複雑で大まかなシナリオを移動できるロボットの作成に力を注いで、ほぼすべての地形を歩くだけでなく、それ以上のことを行う四足歩行ロボットを開発しました。その名前Doggoです。
「このようなモデルは以前に見たことがありますが、オープンソースではありません。」 サイコロ ネイサンカウ、プロジェクトの頭にある機械エンジニア。 「Doggoの素晴らしいところは、比較的低い予算で自分で構築できることです。」
どれくらい低い?
仕事ですでに見られている四足歩行ロボット(現在よく知られているボストンダイナミクスのものと考えてください)の価格は数万ユーロから数十万ユーロですが、約3000ユーロ(部品の製造と配送を含む)の価格で、「自宅」で作ることができます。立派なロボット:このシステムの開発者の大規模なコミュニティを作成し、それを拡張および改善できる見込みはかなり具体的です。
Doggoのプロジェクトを複製可能にするために、生徒たちは最初からプロジェクトを作成しました。 これは、初期の研究に費やす作業と時間が増えることを意味しましたが、コストを大幅に削減しました。
Doggoの機能
実を言うと、Doggoはすでに動きにかなり長けています。彼は、血まみれの同僚と同じように、歩いたり、トロットしたり、高くジャンプしたり、長くジャンプしたり、自分の腹に身を置くことができます。 それは現在ビーグルのサイズですが、スタンフォードウーファーと呼ばれるより大きなバージョンが研究されています、それはカナダのモントリオールでのロボット工学とオートメーションに関する国際会議で明日発表されるかもしれません。
「8000年前、私たちは完全にオープンソースの四足歩行ロボットを作るというアイデアを持っていました。多くのプロトタイプの後、私たちはDoggoを使用することを決めました」とチームのナタリーフェランテは説明します。 「彼が初めて歩くのを見るのはスリリングでした。」 最初はいくつかの発育不全のステップがありましたが、毎秒XNUMX回位置を計算できるモーターのおかげで、XNUMXメートルの高さで踊ったりジャンプしたりできます。
「いくつかのケースでは、これらはすでに開発された最も人気のあるロボットのパフォーマンスよりも優れています」とカウは説明します。
Doggoは今何をしますか?
すべてが予定どおりに進んだ場合、DoggoはXNUMX足歩行ロボットの一定の広がりの始まりを示します。 「私たちは誰もがこのようなロボットを構築するのを助けるプラットフォームを構築するために取り組んでいます」 サイコロ パトリック・スレイド、チームの別のメンバー。 「レスキューフィールドで作業したい場合は、Doggoに特定のセンサーを装備し、洞窟を通過したり瓦礫の上を通過できるようにコードを記述したりできます。 輸送に使用する場合は、メカニカルアームまたはコンテナを装備して、出荷したいものを集めることができます。
私はそれを大規模な「ロボット化」と考えています。フレンドリーで、優れたヒューマンファクターとオープンソースを備えています。

