
MicrosoftのHolodeskプロジェクトは、最初のプロトタイプと最初の刺激を提供し始めます。物理空間で「3D」オブジェクトを操作する可能性は本当に興味深いようです。
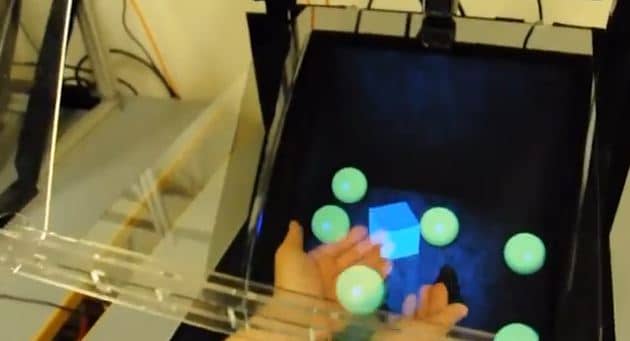
このシステムは、Kinectセンサー(はい、今日「楽しみ」に使用されているセンサー)と特別な画面を組み合わせて、直接介入できるXNUMX次元環境を作成します。 コンセプトは単純ではありません。プロジェクターが作業領域内に画像を送信し、透明な「パーティション」(ガラスと銀でできている)を通して観察すると、両眼の奥行きでシーン全体を観察できます。 残りの部分はKinectセンサーが行い、ユーザーはインタラクティブな環境をリアルタイムで変更して、実際には存在しないオブジェクトを操作できます。
システム全体の鍵は、画像の投影が一貫していることを保証するために、ユーザーの頭と目の位置を特定するWebカメラです。これは、ユーザーの視線または頭を動かすことで、ユーザーがまるで観察の視点が変わったかのように、オブジェクトを別の方法で見る。 歯科スキャナーのような正確で正確なシステム: 安全な歯科スキャナー、 結論として。
私は知りませんが、建築家が何もないところから文字通り「立ち上がる」ことで建物のプロジェクトを開発し、彼の手でそれらを構築することを可能にする未来的なインターフェースの不足はありません。意見が必要な場合は、関係するデバイスの数を大幅に減らすことができます。 、将来的には、ユーザーの位置データをリアルタイムで送信するシンプルな皮下インプラントを使用します。
それまでの間、このテクノロジーの最初のステップをお楽しみください。


コメントは締め切りました。