
ロボット工学に関して言えば、エンジニアは自然から多くのインスピレーションを得ているようです。 私たちのタグを見てみると "バイオミメティック海底のパイプラインを修理したり、トンネルを掘ったりしている間、多かれ少なかれ動物の形をした、多くの場合はヘビだけの、最も多様なロボットを見つけることができます。
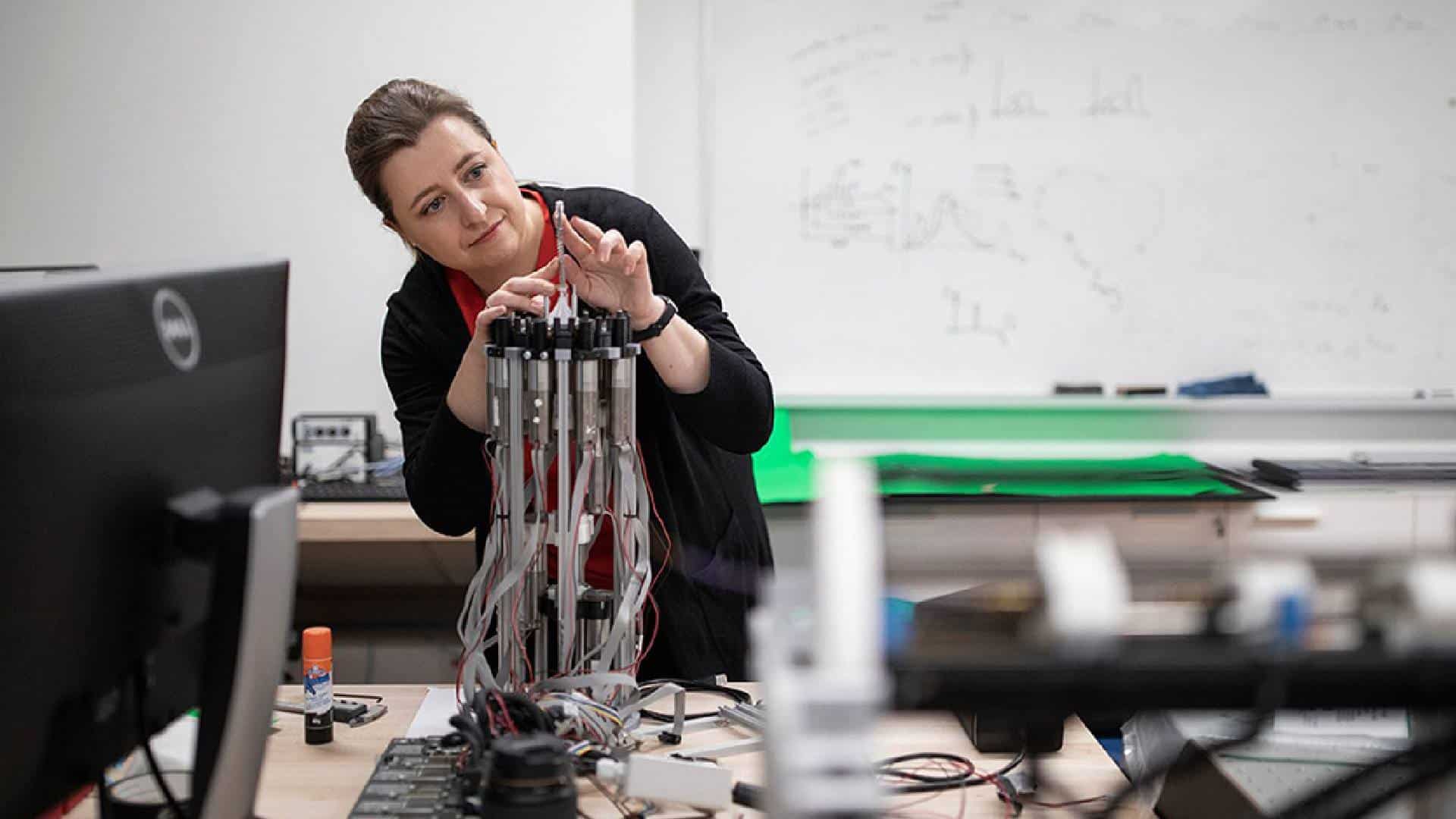
今から プレスリリース トロント大学の Continuum Robotics Lab のニュースによると、 ジェシカ・バーグナー・カーズ 医師が命を救うために使用できる非常にスリムで柔軟で拡張可能なロボットを構築しており、そうでなければ外科医には不可能なポイントにアクセスします.
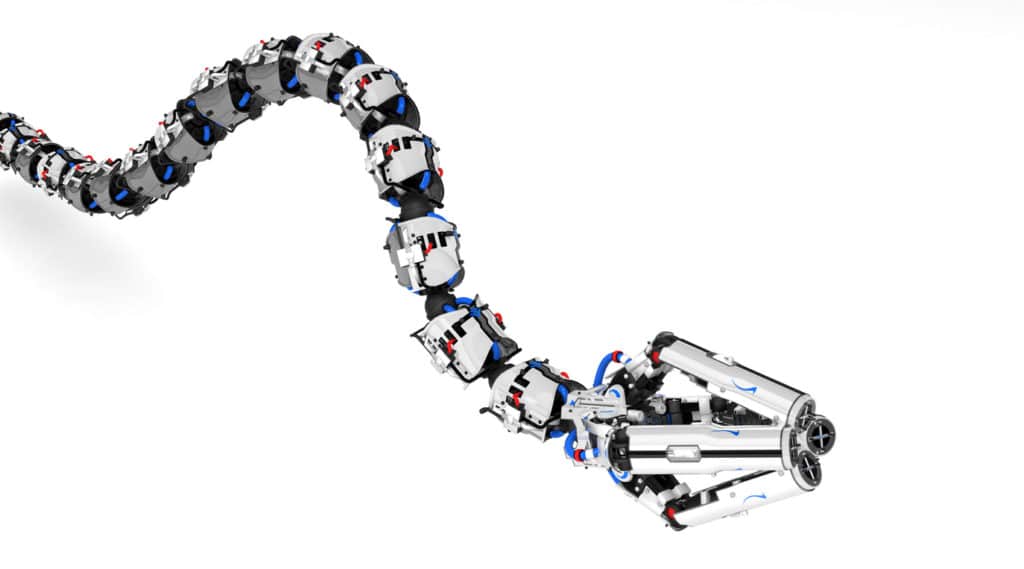
命を救うヘビ型ロボット
「脳腫瘍の切除が必要な脳神経外科医を考えてみてください。 従来の硬直した手術器具では、医師は脳内のまっすぐな経路をたどってがんの塊に到達しなければならず、重要な組織を貫通する (そして損傷する) リスクがあります」とプレスリリースを読みます.
チームはまた、より熟練した拡張可能な新しいスネーク ロボットの実験も行っています。 そのうちの 10 つは折り紙から着想を得たもので、非常に軽く、他のモデルの XNUMX 倍まで伸ばすことができます。 彼らはさらに改善することしかできません。
Burgner-Kahrs は、外科医に導かれた蛇のようなロボットの XNUMX つが、重要な組織の周りを曲がりくねったストレッチをしながら移動しながら、正確な手術点に到達するという使用シナリオを想像しています。 結果? 以前は「不可能」だった脳腫瘍が、突然手術可能になることがあります。
確かに、これは小さな偉業ではありません。これらの「ヘビ」は、医療業界全体に革命を起こす可能性があります。
精密手術の未来に対する XNUMX つの質問
洗練された柔軟なロボットが外科医を助けることができるというアイデア (半自律的であっても、研究者はすでに取り組んでいます) は本当に素晴らしいものです。
これを達成するために、Burgner-Kahrs は次の XNUMX つの具体的な質問を自分自身に問いかけます。
- 限られた曲がりくねった環境でロボットをより正確に動かすにはどうすればよいでしょうか?
- 人間とロボットの間のより直感的なインターフェースを設計できますか?
- 完全自律型のスネーク ロボットを作ることはできますか?
- チームで複数のロボットを使用して共同作業を完了するにはどうすればよいでしょうか?
未来はすべてその答えにかかっています。

