

水中には、陸上で見られるよりもはるかに大きな世界があります。 私たちがほとんど知らない資源とシナリオに満ちた世界。 私たちはしばらくの間海底を探索してきました さまざまなプロジェクトで、しかし大きな課題はマッピングを自動化することです。自律型ロボットにとって水中環境は特に困難です。
それは道路ではなく、物体は絶えず動き、変化し、ロボットはGPS情報に依存せずにそれらがどこにあるかを把握する必要があります。 会社。
海底を知る愛
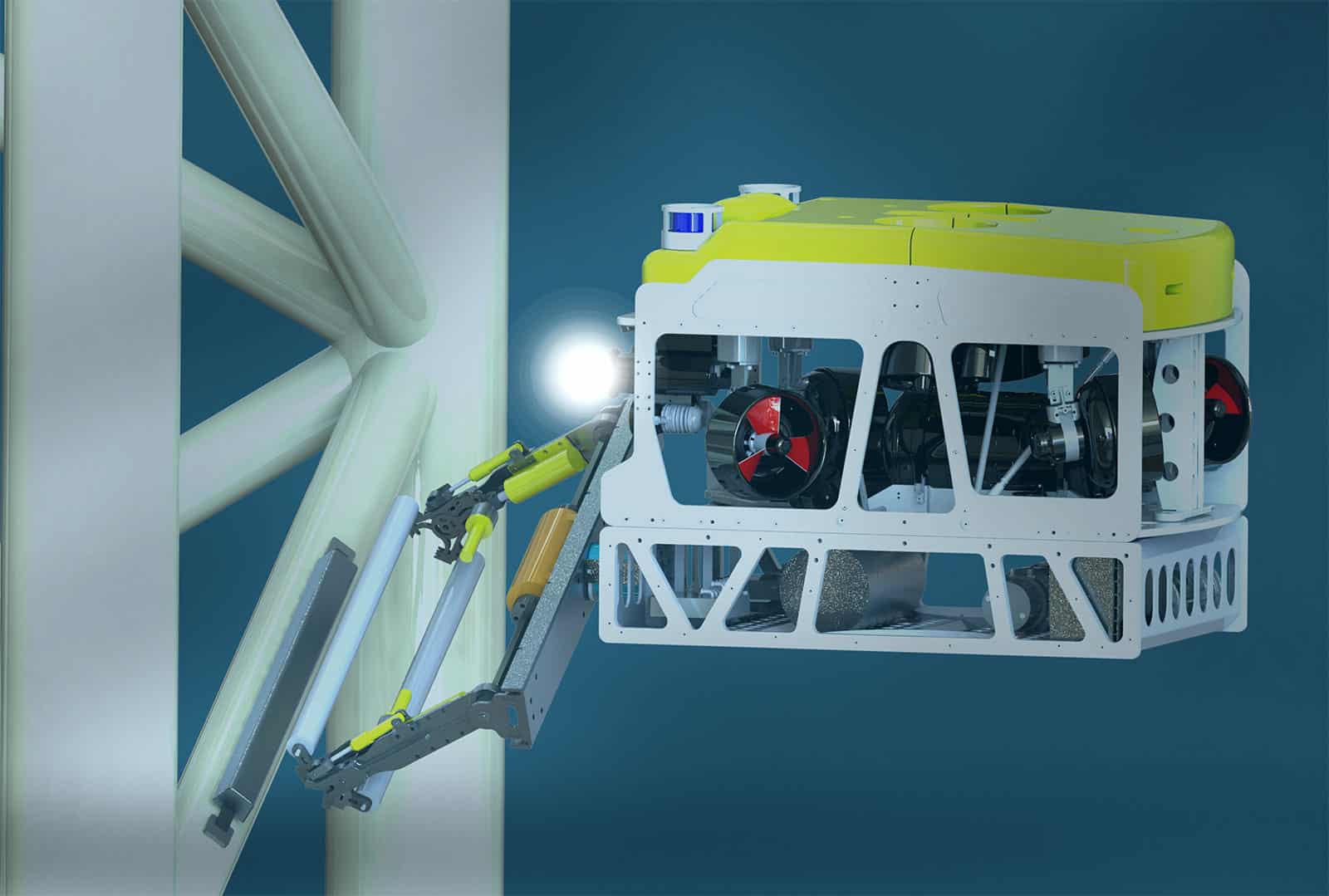
からの研究者のチーム スティーブンス工業技術大学 混雑したマリーナでも水中を移動できるロボットを開発しました。 ロボットはリアルタイムで、その環境と海底をマッピングし、その位置を追跡し、複雑な環境を安全に通過するように設計することができます。
「障害物で満たされた環境での水中マッピングは非常に難しい問題です。飛行ロボットや陸上ロボットと同じ状況認識がないため、ロボットを水中に送ることは本質的に危険なプロセスになります」と彼は言います。 ブレンダン・エングロット、スティーブンス工科大学のプロジェクトリーダーおよび暫定ディレクター。
人工知能がシステムを変革しました。作成されたアルゴリズムにより、ロボットはその位置と周囲の環境に関する不確実性のレベルを追跡および管理できます。 この新しい「認識」により、ロボットは予期しない状況でもリアルタイムで意思決定を行います。 Englot自身の言葉を使用するために、ロボットは「知らないことを知っている」。
可能なアプリケーション
ロボットには、港の修理、洋上風力発電所の建設と保守、養殖プロジェクト、掘削リグなど、多くの潜在的な用途があります。 今後、Englotチームは、ロボットプラットフォームを強化して、より長く続く水中ミッションを可能にすることを計画しています。
ただし、下部をマッピングする前の次のステップは、下部に到達することです。 カスタムBlueROV2であるロボットは、現在1メートルの深さで動作し、ソナー信号を使用して周囲の物体を検出します。 彼の最初の「仕事」は、ニューヨーク州キングスポイントにある米国商船アカデミーの港を(成功裏に)地図化することでした。
私たちは、現在の道路の静けさと確実性をもって海底を知らしめ、実行可能にするというコミットメントの夜明けにいます。 確かに、いつか私たちはそれらを遠くまで歩きますが、その間に自律型ロボットが私たちのためにそれを行います。

