
イタリア工科大学の研究者は、「ハンドフック」と呼ばれる植物の葉のマイクロリング構造に基づいて、柔らかく、生分解性で可溶性のベルクロを開発しました。
チームは、新しく作られた材料を使用して、栽培植物の健康状態を監視する小さなデバイスを構築し、必要に応じて薬や栄養を提供しました。 すべて研究プロジェクトの文脈で CommunicationsMaterials誌に掲載されました。
ベルクロ、小さな星の誕生

ベルクロの作成者は、George deMestralという名前のスイスのエンジニアでした。 1948年、デメストラルは仕事から狩りに行くためにXNUMX週間の休暇を取りました。ジュラ山脈でアイルランドのポインターを持ってハイキングしている間、彼は野生のごぼうの種に苦しめられました。 それらの惨めさは彼の服と犬の毛皮の両方に執拗に付着しました。 粘り強く、とても粘り強い。
デメストラルが顕微鏡でそれらのいくつかを調べたいと思ったところまで。
彼は、各種子の外側が、糸のループ、または犬の場合は毛皮に引っ掛かる何百もの小さなフックで覆われていることに気づきました。 そして彼にアイデアが浮かんだ。 ベルクロが生まれました(フランス語のVELours、「ベルベット」、CROchet、「フック」から)。
1960年に導入されたベルクロはすぐには成功しませんでしたが、NASAはそれが宇宙飛行士にとって有用であると考えました。 その瞬間から、それは年間60万メートルの販売まで上昇し始めました:1990年に彼の死で、良いデメストラルは数百万長者でした。
今日それは事実上どこにでもあります
ベルクロは、靴、バックパック、財布、ジャケット、ストラップなど、さまざまな用途に使用されています。 彼らはそれを使って、最初の人工心臓移植中に人間の心臓が一緒にとどまるのを助けました。 ベルクロはナイロンでできているので、それの生分解性バージョンを作るというアイデアは素晴らしいです。 どのように開発されましたか?
科学者 イザベラフィオレロ 彼の同僚は、植物を監視する新しい方法を見つけたいと考えていました。 彼らは、デバイスを損傷することなく葉に取り付ける方法があるかどうか疑問に思いました。 それらにはXNUMXつのオプションがありました:それらを化学的に結合するか、マイクロニードルパッチを使用します。
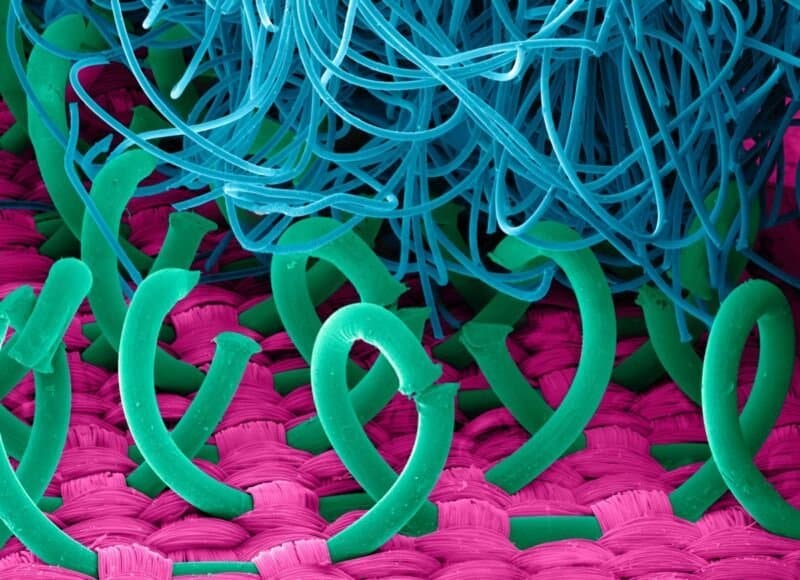
最終的に、彼らは一般的な草本植物からインスピレーションを得ました(ガリウムアパリン)。 それは地面に密なもつれを形成する可能性があり、2メートル(6フィート)近くまで成長しますが、自立することはできず、他の植物をサポートに使用します。 このために、それはマイクロフック固定メカニズムに依存しています。
イタリアのチームはこの小さな構造を非常に綿密に調査し、3Dプリンターを使用して人工バージョンを作成しました。 「天然」ベルクロは、イソマルトに基づく感光性および生分解性のもの(はい、ケーキにも使用されるもの)を含むさまざまな材料でテストされています。 動いた。

植物を助ける生分解性ベルクロ
最初のアプリケーションとして、チームは最小限の侵襲性で植物のキューティクルに浸透できるデバイスを設計しました。これにより、必要に応じて植物を監視および処理できるようになります。 イソマルトを含む「ベルクロ」のマイクロフックは、葉の血管系に付着し、イソマルトが溶解するため、内部で溶解します。
実験は、人工マイクロニードルを「スマートリリース」パッチとして使用して、農薬の使用をできるだけ少なくできることを示しました。 生分解性ベルクロパッチは一度貼ると溶けるので無駄がありません。
チームはまた、感光性樹脂で作られたフックを印刷し、それらを光、温度、湿度センサーと組み合わせてスマートクリップを作成しました。 これらのクリップは個々の葉に取り付けられ、カスタムソフトウェアを使用してワイヤレスでデータを送信します。
プロトタイプは、風の強い条件で最大50日を測定することができました。 このデバイスは、大規模な栽培地域をより適切にマッピングおよび監視するために多くのデバイスを展開している農家など、小規模または大規模な植物アプリケーションに使用できます。
次のステップ
フィオレッロ博士のチームは、生分解性のベルクロを開発しただけではありません。これを明確にしたと思います。 しかし、それはまた、高度な植物監視および給餌システム以上のことをしました。 また、葉の表面を小さなステップで移動できる一種のマイクロも開発しました。 植物のように動きます。 SpinyBotで以前に実証されたものと同様のメカニズム スタンフォード大学、および CLASHロボット バークレーの、カーテンなどの吊り下げられた緩い布の表面に登ることができます。
しかし、イタリアのものにはもっと何かがあります。 「私たちが知る限り、これは葉の上を移動できる最初の植物に着想を得た概念実証マシンです」と著者は書いています。 ただし、このためには、障害を克服する必要があります。まず、このようなロボットを外部などの大気条件で動作させる方法を理解する必要があります。

