
昨年XNUMX月に、ボストンダイナミクスロボットが日常のルーチンを実行する機能をさまざまな進歩に追加した方法を説明しました 体操 困難な地形でバランスを取るため。
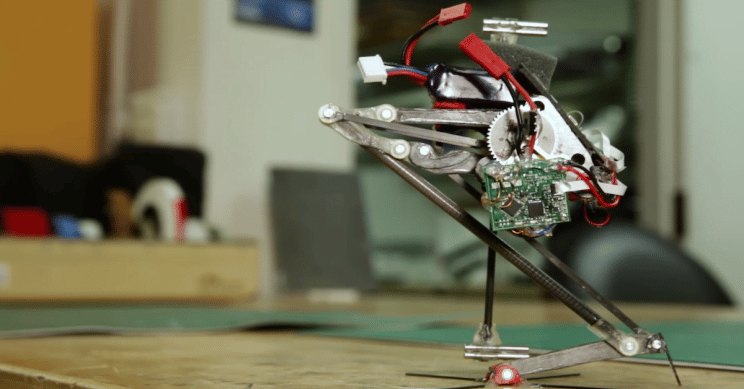
ロボット工学の新たな進歩:カリフォルニア大学バークレー校の生物模倣実験室のロボットであるサルトは、オリンピックアスリートの精度でジャンプできることを示しました。
ペルシャの王子様へ
Saltoは、カリフォルニア大学バークレー校のバイオミメティックスラボで2016年から彼の技術を完成させるために実践しています。 彼はいくつかのジャンプをし、何らかの方法で行った。 最初のジャンプから2018年後のXNUMX年、彼はすでに地面からXNUMXメートル離れていました。 古いプリンスオブペルシャのプラットフォーマーのように、ストレートからストレートまでの静止からの素晴らしいジャンプ。
小さな問題がXNUMXつだけありました。Saltoは着陸方法を知りませんでした。 それは小さな問題ではありません、それは彼の印象的なジャンプが常に着陸できなかったフィギュアスケーターのように床に横たわっているロボットで終わったことを意味します。
問題はSaltoに取り組んでいる研究者の責任者によって説明され、 ジャスティン・イム。 それは、ジャンパーが斜めに着地したとき、 「彼らの落下運動は、膨大な量の角運動量に移行する可能性がある」.
今体操選手のように着陸
体操選手は、バランスを維持するための手段を講じることにより、角運動量の問題を解決します。 これは、Saltoでは不可能です。単純な理由のXNUMXつは、Saltoの足がXNUMXつしかないことです。
そして、サルトは腕を回します
このため、「Saltoの着地角度は非常に正確でなければなりません。さもないと、角運動量が大きくなりすぎてリアクションホイールのテールを防ぐことができません」と彼は説明した。 イム。 「1メートルから落下するサルトは、落下することなく着陸したい場合、前方または後方に2.3度の余裕しかありません。」
UCバークレーチームは、リープロボットをプログラムして、誰かがビームまたはレッジに着陸したときと同じように、リアクションホイールのテールを回転させて、前進できないときにバランスを保つために腕を回しました。
60ジャンプのテストで、サルトは52回だけ転倒し、「かかと」にXNUMX回座って、完全に制御された着陸をXNUMX回行いました。
バークレーチームが実際の目標を達成するのに役立つ精度:困難な地形を横切り、捜索救助任務で人間を助けることができるロボットを構築すること。

